Design I






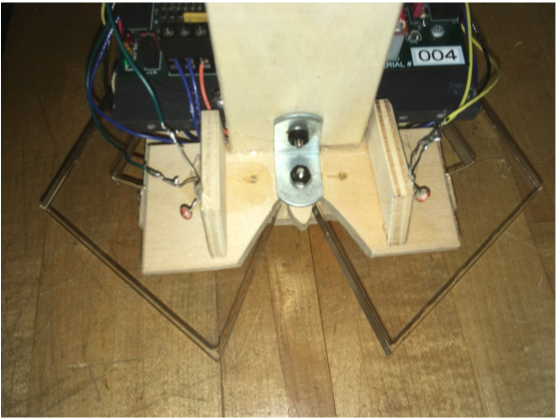
I designed a robot to complete tasks using Arduino and Photocells. The robot’s ability to complete the objectives, crossing the arena and hitting both light switches, is dependent on the use of bumpers (to detect when the robot hits an obstacle and prevent it from getting stuck and constantly driving against a wall or corner), light sensors, or photosensitive resistors (to detect changes in light and steer the robot), and code that will allow the robot to move about and finish its task. All of these modifications were added to a basic chassis, which comes with the Arduino board [and two sets of motors and wheels]. The motors were wired to the Arduino board and controlled using the Arduino software, while the bumper switches and light sensors were also wired to the board and had software that can interpret and act upon their data.
Programs: Arduino